
33
OpenCV image processing using Python
We need to import few libraries given below and are available in Google Colab, independent installations may be required for other platforms.
1. Imports required
from scipy.spatial import distance as dist
from imutils import perspective
from imutils import contours
import numpy as np
import argparse
import imutils
import cv2
import matplotlib.pyplot as plt
from google.colab.patches import cv2_imshow2. Next we import an image and get its details
mg = cv2.imread(r'/content/parrot.jpg',cv2.IMREAD_UNCHANGED)
height = img.shape[0]
width = img.shape[1]
channels = img.shape[2]
size1 = img.size
cv2_imshow(img)
print('Image Height : ',height)
print('Image Width : ',width)
print('Number of Channels : ',channels)
print('Image Size :', size1)Remember we are using Colab and it uses its own snippets.
3. First lets try to get distance between two pixels
pixel = img[100,100]
pixel1 = img[200,200]
pixel_diff= pixel1-pixel
print("The difference between the two pixels is :",pixel_diff)
4. Next lets try Point processing in the spatial domain on Image, Image Negatives and Power-Law (Gamma) Transformation.
Negative
print("Part A : Negative of the image")
plt.imshow(img)
plt.show()
# negative transformed image
color = ('b', 'g', 'r')
plt.show()Power-Law (Gamma) Transformation
print("Part B : Power Law ")
img = cv2.imread('/content/parrot.jpg', cv2.IMREAD_UNCHANGED)
gamma_two_point_two = np.array(255*(img/255)**2.2,dtype='uint8')
# Similarly, Apply Gamma=0.4
gamma_point_four = np.array(255*(img/255)**0.4,dtype='uint8')
# Display the images in subplots
img3 = cv2.hconcat([gamma_two_point_two,gamma_point_four])
cv2_imshow(img3)We used hconcat for displaying results together.

5. lets try some Point processing in the spatial domain.
Contrast stretching
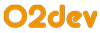
print("Part C : Gray-level slicing, Contrast stretching")
img = cv2.imread('/content/parrot.jpg', cv2.IMREAD_UNCHANGED)
def pixelVal(pix, r1, s1, r2, s2):
if (0 <= pix and pix <= r1):
return (s1 / r1)*pix
elif (r1 < pix and pix <= r2):
return ((s2 - s1)/(r2 - r1)) * (pix - r1) + s1
else:
return ((255 - s2)/(255 - r2)) * (pix - r2) + s2
r1 = 70
s1 = 0
r2 = 140
s2 = 255
pixelVal_vec = np.vectorize(pixelVal)
# Apply contrast stretching.
contrast_stretched = pixelVal_vec(img, r1, s1, r2, s2)
print("Constrat Strethcing :")
# Save edited image.
cv2_imshow(contrast_stretched)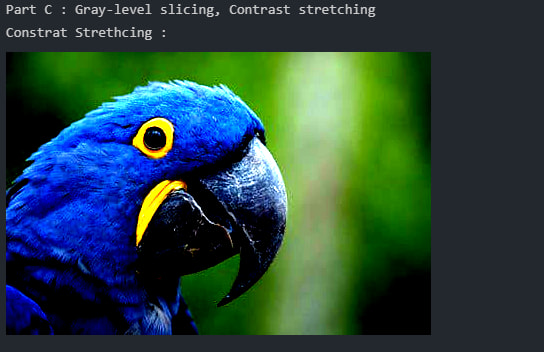
Gray-Level Slicing
class pointProcessing:
def slicedGreyScale(self,image):
# T1 and T2 Represent Lower and Upper Threshold Value
T1 = 100
T2 = 200
h, w, c = img.shape
img_thresh_back = np.zeros((h,w), dtype=np.uint8)
for i in range(h):
for j in range(w):
if (T1 < image[i,j] and image[i,j] < T2):
img_thresh_back[i,j]= 255
else:
img_thresh_back[i,j]= image[i,j]
cv2_imshow(img_thresh_back)
pointObj= pointProcessing()
pointObj.slicedGreyScale(img)
6. Nearest neighbour Interpolation & Bilinear Interpolation.
Use of Average neighbour value and Bilinear
#Nearest neighbor Interpolation Using cv2.resize()Python
near_img = cv2.resize(img,None, fx = 2, fy = 2, interpolation = cv2.INTER_NEAREST)
cv2_imshow(near_img)
# Bilinear Interpolation
bilinear_img = cv2.resize(img,None, fx = .5, fy = .5, interpolation = cv2.INTER_LINEAR)
cv2_imshow(bilinear_img)
7. Lets try other operations available in OpenCV
Addition and Division -
print("A : Addition and Division :")
img1 = cv2.imread('/content/parrot.jpg')
img2 = cv2.imread('/content/bg.jpg')
dst = cv2.addWeighted(img1,0.3,img2,0.7,0)
#Div
div = cv2.divide(img1, img2)
AddDiv = cv2.hconcat([dst,div])
cv2_imshow(AddDiv)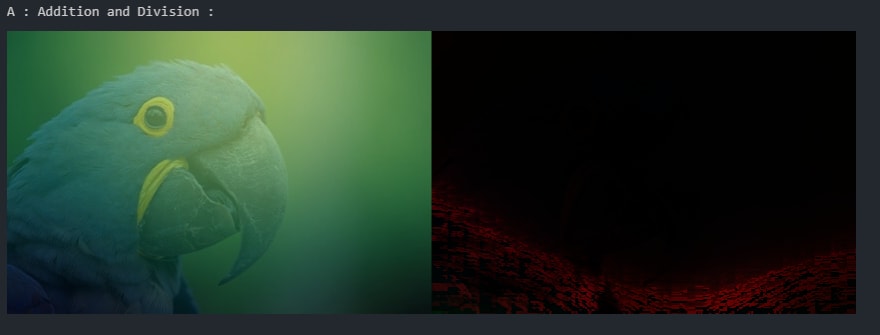
XOR and NOT
print("B : Xor and Not Operations :")
#XOR function
bitwiseXor = cv2.bitwise_xor(img1, img2)
#NOT function
bitwiseNot = cv2.bitwise_not(img1)
#concat
img5 = cv2.hconcat([bitwiseXor,bitwiseNot])
cv2_imshow(img5)
Rotation and Affine Translation
print("C : Geometric Operations :")
print("Rotation and Affine Translation :")
#Rotation
image = cv2.rotate(img1, cv2.cv2.ROTATE_90_CLOCKWISE)
cv2_imshow(image)
#Affine Translation
srcTri = np.array( [[0, 0], [img1.shape[1] - 1, 0], [0, img1.shape[0] - 1]] ).astype(np.float32)
dstTri = np.array( [[0, img1.shape[1]*0.33], [img1.shape[1]*0.85, img1.shape[0]*0.25], [img1.shape[1]*0.15, img1.shape[0]*0.7]] ).astype(np.float32)
warp_mat = cv2.getAffineTransform(srcTri, dstTri)
warp_dst = cv2.warpAffine(img1, warp_mat, (img1.shape[1], img1.shape[0]))
# Rotating the image after Warp
center = (warp_dst.shape[1]//2, warp_dst.shape[0]//2)
angle = -50
scale = 0.6
rot_mat = cv2.getRotationMatrix2D( center, angle, scale )
warp_rotate_dst = cv2.warpAffine(warp_dst, rot_mat, (warp_dst.shape[1], warp_dst.shape[0]))
cv2_imshow(warp_dst)
Mean and Variance
print("D : Mean, Variance :")
#Mean of img1 and img2
img7 = (img1+img2) * 0.5;
cv2_imshow(img7)
#Variance
Image interpolation : Down Sampling
print("E : Image interpolation : Down Sampling")
ds = cv2.pyrDown(img1)
cv2_imshow(ds)
As of now, We have covered the basics of OpenCV
33